

УДК:
621
Электродвигатель — механизм, преобразующий энергию электрического тока в кинетическую энергию. Современное производство и быт сложно представить без машин с электроприводом. Они используются в насосном оборудовании, системах вентиляции и кондиционирования, в электротранспорте, промышленных станках различных типов и т.д.
При выборе электродвигателя необходимо руководствоваться несколькими основными критериями:
- Что такое энергеэффективность электродвигателя?
- Основные потери можно условно разделяют на
- Энергоэффективность электродвигателей*
- Современные подходы к повышению КПД асинхронных двигателей
- Частотные преобразователи для асинхронных двигателей
- Принцип работы преобразователя частоты
- Возможности частотных преобразователей
- Стоимость
- Достоинства и недостатки
- Устройства плавного пуска
- Выбираем лучшее решение для повышения КПД
- Классы энергоэффективности IEC
- Типы двигателей
- Синхронные электродвигатели
- Асинхронные электродвигатели
- Вентильные электродвигатели
- Пусковой ток электродвигателя
- Мощность электродвигателя
- Режимы работы электродвигателей
- В асинхронных двигателях повышение энергоэффективности достигается за счет
- Зачем нужна стандартизация энергоэффективности двигателей?
Что такое энергеэффективность электродвигателя?
Понятие энергоэффективность означает оптимальное использование энергии, благодаря которому достигается снижение ее потребления при идентичной мощности нагрузки. Еще со школы мы знаем, что двигатель при работе теряет долю энергии в виде тепла. Главным знаком энергоэффективности электродвигателей является КПД. КПД – это отношение полезно использованной к суммарной энергии, полученной системой.
Основные потери можно условно разделяют на
Совокупный КПД электродвигателей составляет около 70 %, поэтому уровень их энергоэффективности играет значительную роль в решении задачи энергосбережения предприятия. Стоимость энергоэффективных электродвигателей в 1,2-2 раза больше стоимости электродвигателя стандартной энергоэффективности, поэтому срок окупаемости дополнительных затрат составляет 2-3 года в зависимости от среднегодовой наработки.
Уже около пяти лет «НПО „Санкт-Петербургская электротехническая компания“ (СПБЭК) настойчиво собирает по предприятиям, институтам, научным центрам бывшего Союза внедренные рацпредложения, инновации, разработки.
Еще одна новация, применимая в российских реалиях связана с именем Дмитрия Александровича Дуюнова, занимающегося проблемой повышения энергоэффективности асинхронных двигателей:
«В России на долю асинхронных двигателей, по разным оценкам, приходится от 47 до 53% потребления всей вырабатываемой электроэнергии. В промышленности в среднем 60%, в системах холодного водоснабжения до 80%. Они осуществляют практически все технологические процессы, связанные с движением и охватывают все сферы жизнедеятельности человека. В каждой квартире находится асинхронных двигателей больше, чем жильцов. Ранее, поскольку задачи экономии энергоресурсов не было, при проектировании оборудования стремились „подстраховаться“, и использовали двигатели с мощностью, превышающей расчетную. Экономия электроэнергии в проектировании отходила на второй план, и такое понятие как энергоэффективность не было столь актуальным. Промышленность России энергоэффективные двигатели не проектировала и не выпускала. Переход к рыночной экономике резко изменил ситуацию. Сегодня сэкономить единицу энергетических ресурсов, например 1 т топлива в условном исчислении, вдвое дешевле, чем её добыть.
Энергоэффективные двигатели (ЭД) — это асинхронные ЭД с короткозамкнутым ротором, в которых за счет увеличения массы активных материалов, их качества, а также за счет специальных приемов проектирования удалось поднять на 1-2% (мощные двигатели) или на 4-5% (небольшие двигатели) номинальный КПД при некотором увеличении цены двигателя. Этот подход может приносить пользу, если нагрузка меняется мало, регулирование скорости не требуется и двигатель правильно выбран. С появлением двигателей с совмещенными обмотками „Славянка“ имеется возможность существенно улучшить их параметры без увеличения их цены. За счет улучшенной механической характеристики и более высоких энергетических показателей, стало возможным не только экономить от 30 до 50% потребления энергии при той же полезной работе, но и создавать регулируемый привод с уникальными характеристиками, не имеющий аналогов в мире.
В отличие от стандартных, ЭД с совмещенными обмотками обладают более высокой кратностью моментов, имеют КПД и коэффициент мощности близкий к номинальному в широком диапазоне нагрузок. Это позволяет повысить среднюю нагрузку на двигатель до 0,8 и повысить эксплуатационные характеристики обслуживаемого приводом оборудования.
По сравнению с известными методами повышения энергоэффективности асинхронного привода, новизна предлагаемого нами подхода заключается в изменении основополагающего принципа конструкции классических обмоток двигателя. Научная новизна заключается в том, что сформулированы новые принципы конструирования обмоток двигателей, а также выбора оптимальных соотношений чисел пазов ротора и статора. На их основе разработаны промышленные конструкции и схемы однослойных и двухслойных совмещенных обмоток, как для ручной, так и для автоматической укладки обмоток на стандартном оборудовании. На технические решения получен ряд патентов РФ.
Сущность разработки вытекает из того, что в зависимости от схемы подключения трёхфазной нагрузки к трёхфазной сети (звезда или треугольник) можно получить две системы токов, образующий между векторами угол в 30 электрических градусов. Соответственно, к трёхфазной сети можно подключить электродвигатель, имеющий не трёхфазную обмотку, а шестифазную. При этом часть обмотки должна быть включена в звезду, а часть в треугольник и результирующие вектора полюсов одноименных фаз звезды и треугольника должны образовывать между собой угол в 30 электрических градусов. Совмещение двух схем в одной обмотке позволяет улучшить форму поля в рабочем зазоре двигателя и как следствие существенно улучшить основные характеристики двигателя.
По сравнению с известными, частотно-регулируемый привод может быть выполнен на базе новых двигателей с совмещенными обмотками с повышенной частотой питающего напряжения. Это достигается за счёт меньших потерь в стали магнитопровода двигателя. В результате себестоимость такого привода получается существенно ниже, чем при использовании стандартных двигателей, в частности, значительно снижаются шумность и вибрации».
АннотацияРассматриваются способы энерго-сбережения в дымососах с использованием частотно-регулируемого асинхронного электропривода с преобразователями частоты, частота и напряжения регулируется по закону академика М.П. Костенко, что значительно позволяет экономить энергию во всем диапазоне регулирования частоты.
Рис. 1. Функциональная схема частотно-регулируемым асинхронным электроприводом с высоковольтным преобразователем частоты типа ВПЧА
номинальное значение напряжения статора, sкр – критическое значение сползания в номинальном режиме, т.е. когда частота напряжения составляет
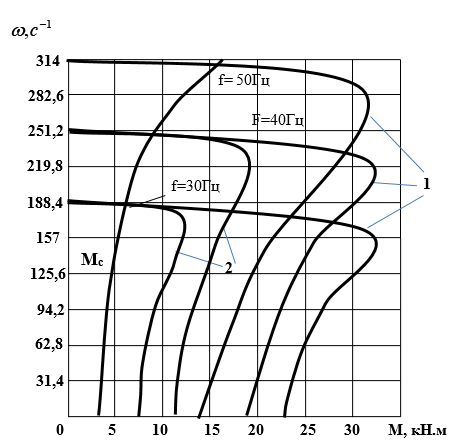
Рис. 2. Механические характеристики асинхронного двигателя дымососа, скорость которого выпрямляется посредством регулирования; управление частотой на основе пропорционального закона (1) и закона акад. М.П.Костенко (2); МС — момент загрузки дымососа
Показатели асинхронного двигателяОтносительное значение частоты
На основе значений, приведенных в таблице, строим описание изменений полной, активной и реактивной мощности асинхронного двигателя дымососа в зависимости от частоты для обоих законов управления частотой. (см. рис. 3).

Рис. 3. Характеристика изменений полной, активной и реактивной мощности асинхронного двигателя дымососа в зависимости от частоты на основе пропорционального закона (1) и закона акад. М.П.Костенко (2)
Анализ показывает, что в выпрямлении скорости асинхронного двигателя дымососа в результате применения закона академика М.П.Костенко частота асинхронного двигателя при значениях f = 40 Гц и f = 40 Гц уменьшилось потребление реактивной мощности от сети на 23% и 64%. В результате полная мощность потребляемой двигателем от сети снизилась на 8,9% и 43% соответственно.
Все статьи автора «Режабов Зайлобиддин Маматович»
Повысить мощность и существенно снизить энергопотребление сгоревших и новых асинхронных двигателей позволяет уникальная технология модернизации с применением совмещенных обмоток типа «Славянка». Сегодня ее успешно внедряют на нескольких крупных промышленных предприятиях. Такая модернизация позволяет повысить на 10-20% пусковые и минимальные моменты, понизить на 10-20% пусковой ток или повысить мощность электродвигателя на 10-15%, стабилизировать КПД близким к номинальному в широком диапазоне нагрузок, понизить ток холостого хода, снизить в 2,7-3 раза потерь в стали, уровень электромагнитных шумов и вибраций, повысить надёжность и увеличить межремонтный срок эксплуатации в 1,5 — 2 раза.
В России на долю асинхронных двигателей, по разным оценкам, приходится от 47 до 53% потребления всей вырабатываемой электроэнергии, в промышленности — в среднем 60%, в системах холодного водоснабжения — до 80%. Они осуществляют практически все технологические процессы, связанные с движением и охватывают все сферы жизнедеятельности человека. В каждой квартире можно найти асинхронных двигателей больше, чем жильцов. Ранее, поскольку задачи экономии энергоресурсов не было, при проектировании оборудования стремились «подстраховаться», и использовали двигатели с мощностью, превышающей расчетную. Экономия электроэнергии в проектировании отходила на второй план, и такое понятие как энергоэффективность не было столь актуальным. Энергоэффективные двигатели российская промышленность не проектировала и не выпускала. Переход к рыночной экономике резко изменил ситуацию. Сегодня сэкономить единицу энергетических ресурсов, например, 1 т топлива в условном исчислении, вдвое дешевле, чем её добыть.
С появлением двигателей с совмещенными обмотками «Славянка» по запатентованной схеме стало возможно существенно улучшить параметры двигателей без увеличения цены. За счет улучшенной механической характеристики и более высоких энергетических показателей, стало возможным экономить до 15% потребления энергии при той же полезной работе и создавать регулируемый привод с уникальными характеристиками, не имеющий аналогов в мире.
В отличие от стандартных, ЭД с совмещенными обмотками обладают высокой кратностью моментов, имеют КПД и коэффициент мощности близкий к номинальному в широком диапазоне нагрузок. Это позволяет повысить среднюю нагрузку на двигатель до 0,8 и повысить эксплуатационные характеристики обслуживаемого приводом оборудования.
По сравнению с известными методами повышения энергоэффективности асинхронного привода новизна технологии, применяемой петербуржцами, заключается в изменении основополагающего принципа конструкции классических обмоток двигателя. Научная новизна — в том, что сформулированы совершенно новые принципы конструирования обмоток двигателей, выбора оптимальных соотношений чисел пазов роторов и стартора. На их основе разработаны промышленные конструкции и схемы однослойных и двухслойных совмещенных обмоток, как для ручной, так и для автоматической укладки обмоток на стандартном оборудовании. На технические решения получен ряд патентов РФ.
Сущность разработки в том, что в зависимости от схемы подключения трёхфазной нагрузки к трёхфазной сети (звезда или треугольник) можно получить две системы токов, образующий между векторами угол в 30 электрических градусов. Соответственно, к трёхфазной сети можно подключить электродвигатель, имеющий не трёхфазную обмотку, а шестифазную. При этом часть обмотки должна быть включена в звезду, а часть в треугольник и результирующие вектора полюсов одноименных фаз звезды и треугольника должны образовывать между собой угол в 30 электрических градусов. Совмещение двух схем в одной обмотке позволяет улучшить форму поля в рабочем зазоре двигателя и как следствие существенно улучшить основные характеристики двигателя.
По сравнению с известными, частотно-регулируемый привод может быть выполнен на базе новых двигателей с совмещенными обмотками с повышенной частотой питающего напряжения. Это достигается за счёт меньших потерь в стали магнитопровода двигателя. В результате себестоимость такого привода получается существенно ниже, чем при использовании стандартных двигателей, в частности, значительно снижаются шумность и вибрации.
Применение данной технологии при ремонтах асинхронных двигателей позволяет за счет экономии электроэнергии окупить затраты в течение 6-8 месяцев. За последний год только Научно-производственное объединение «Санкт-Петербургская электротехническая компания» модернизировала несколько десятков сгоревших и новых асинхронных двигателей путем перемотки обмоток статора на ряде крупных предприятий Санкт-Петербурга в сфере хлебопекарной, табачной промышленностях, заводах стройматериалов и многих других. И это направление успешно развивается. Сегодня Научно-производственное объединение «Санкт-Петербургская электротехническая компания» ищет потенциальных партнеров в регионах, способных организовать совместно с петербуржцами бизнес по модернизации асинхронных электродвигателей в своей области.
Подготовила Мария Алисова.
Николай Яловега — основоположник технологии — профессор, доктор технических Наук. Оформлен патент в США в 1996 году. На сегодняшний день срок действия истек.
Дмитрий Дуюнов — разработчик методики расчета схем укладки совмещенных обмоток двигателя. Оформлен ряд патентов.
Энергоэффективность электродвигателей*
Ключевые слова:
энергоэффективность, электродвигатель, энергосбережение
Рассмотрены синхронные и асинхронные электродвигатели общепромышленного исполнения с точки зрения энергоэффективности. Совокупный КПД электродвигателей составляет около 70 %, поэтому уровень их энергоэффективности играет значительную роль в решении задачи энергосбережения предприятия. Стоимость энергоэффективных электродвигателей в 1,2-2 раза больше стоимости электродвигателя стандартной энергоэффективности, поэтому срок окупаемости дополнительных затрат составляет 2-3 года в зависимости от среднегодовой наработки.
1. ГОСТ Р 54413-2011. Машины электрические вращающиеся. Часть
30. Классы энергоэффективности односкоростных трехфазных асинхронных двигателей с короткозамкнутым ротором (код IE).
2. Стандарт IEC 60034-30:2008. Машины электрические вращающиеся. Часть 30. Классы КПД односкоростных трехфазных асинхронных двигателей с короткозамкнутым ротором (код IE).
3. Сафонов А.С. Основные мероприятия по повышению энергоэффективности электрооборудования АПК // Тракторы и сельхозмашины. – 2014. – № 6. – С. 48-51.
4. Шумов Ю.Н., Сафонов А.С. Энергоэффективные асинхронные двигатели с медной обмоткой ротора, отлитой под давлением (обзор зарубежных публикаций) // Электричество. – 2014. – № 8. – С. 56-61.
5. Шумов Ю.Н., Сафонов А.С. Энергоэффективные электрические машины (обзор зарубежных разработок) // Электричество. – 2015. – № 4. – С. 45-47.
6. Сафонов А.С. Применение энергоэффективных электродвигателей в сельском хозяйстве // Труды II Международной научно-практической конференции «Актуальные вопросы науки и техники», выпуск II. Россия, г. Самара, 7 апреля 2015. ИЦРОН. – 2015. – С. 157-159.
• Применением новых марок электротехнической стали с меньшими удельными потерями и меньшей толщиной листов сердечников.
• Уменьшением воздушного зазора между статором и ротором и обеспечением его равномерности (способствует снижению намагничивающей составляющей тока обмотки статора, уменьшению дифференциального рассеяния и снижению электрических потерь).
• Снижением электромагнитных нагрузок, т.е. увеличением массы активных материалов при уменьшении количества витков и увеличении сечения проводника обмотки (приводит к снижению сопротивлений обмоток и электрических потерь).
Сафонов А.С., Энергоэффективность электродвигателей*. Электроцех. 2018;5.
Полная версия статьи доступна подписчикам журнала
Современные подходы к повышению КПД асинхронных двигателей
Согласно общепринятой классификации электрические машины бывают синхронными — с одинаковой частотой вращения ротора и магнитного поля, и асинхронными — в которых магнитное поле вращается с более высокой скоростью, чем ротор. Электродвигатели последнего типа получили более широкое распространение: порядка 90% всех двигателей на планете являются асинхронными. Они применяются во всех отраслях промышленности, сельского хозяйства и сферы ЖКХ. Такая популярность объясняется тем, что данные механизмы просты в изготовлении, надежны, доступны по цене и не требуют больших эксплуатационных затрат. Кроме того, КПД асинхронного электродвигателя значительно выше, чем синхронного.
Но есть у подобной техники и существенные недостатки. В частности, высокий пусковой ток, недостаточный пусковой момент, несогласованность механического момента на валу привода с механической нагрузкой (что приводит к лавинообразному росту силы тока и избыточным механическим нагрузкам при запуске и снижению КПД в периоды пониженной нагрузки), невозможность точной регулировки скорости работы прибора и т.д. Все эти факторы приводят к тому, что эффективность работы механизма существенно снижается.
На заметкуКлючевыми факторами, влияющими на КПД электродвигателя, являются степень его загрузки по отношению к номинальной, конструкция, модель, степень износа, отклонение напряжения в сети от номинального. Также КПД электродвигателя может заметно снизиться после его перемотки.
Для повышения эффективности работы электропривода необходимо обеспечивать его загрузку на уровне не менее 75%, увеличивать коэффициент мощности, регулировать напряжение и где возможно — частоту подаваемого тока. Реализация этих мер обеспечивается использованием специального оборудования, позволяющего повысить КПД электродвигателя. Однако не во всех случаях возможно или необходимо реализовать их все.
Такие приборы подразделяются на частотные преобразователи, которые изменяют скорость вращения двигателя путем изменения частоты питающего напряжения, а также устройства плавного пуска, ограничивающее скорость нарастания пускового тока и его максимальное значение. В этой статье мы сравним современные решения для повышения КПД двигателей с позиций эффективности работы и экономической целесообразности.
Частотные преобразователи для асинхронных двигателей
Одним из наиболее действенных средств повышения эффективности работы электродвигателя является частотный преобразователь, который трансформирует однофазное или трехфазное напряжение с частотой 50 Гц в напряжение с требуемой частотой (обычно от 1 Гц до 300–400 Гц, но иногда и до 3000 Гц) и амплитудой.
Принцип работы преобразователя частоты
«Частотник» (так в профессиональной среде называют преобразователь частоты) состоит из:
Существует два класса приборов в зависимости от устройства и принципов работы:
Наибольшую популярность получили устройства второго типа, обеспечивающие плавную регулировку оборотов двигателей.
Возможности частотных преобразователей
Эффективность того или иного преобразователя во многом зависит от соответствия его функциональных возможностей целям использования. Так, для оснащения электроприводов насосов и вентиляторов используются преобразователи с невысокой перегрузочной способностью и зачастую с U/f-управлением, которые при необходимости могут повышать начальное значение выходного напряжения с целью увеличения момента двигателя на низких частотах.
Более совершенными являются устройства с векторным управлением, которые регулируют не только частоту и амплитуду выходного напряжения, но и фазы тока, протекающего через обмотки статора. Они устанавливаются на прокатные станы, конвейеры, подъемное, упаковочное оборудование и др.
Если необходимо выполнять контролируемое торможение двигателя, используется функция замедления, которая обеспечивают остановку механизма за счет изменения частоты до нужного уровня. Однако, если требуется интенсивное замедление, может понадобиться «частотник», оснащенный встроенными или внешними блоком торможения и тормозным резистором либо рекуперативным блоком торможения. В режиме динамического торможения двигатель переходит в генераторный режим и трансформирует механическую энергию в электрическую, которая возвращается в звено постоянного тока и либо рассеивается в виде тепла на сопротивлении тормозного резистора, либо возвращает энергию в сеть посредством рекуперации. Это решение актуально для станкового и конвейерного оборудования.
Частотный преобразователь с обратной связью позволяет поддерживать постоянную скорость вращения при переменной нагрузке с более высокой точностью, чем преобразователь без обратной связи, тем самым повышая качество технологического процесса в замкнутых системах. Такие устройства используются в робототехнике, дерево- и металлообработке, в системах высокоточного позиционирования.
Стоимость
В последнее время стоимость «частотников», как бы выразились финансисты, подвержена высокой волатильности: за год–полтора цены значительно увеличились, что объясняется, помимо прочего, колебаниями валютного курса. Так, частотные преобразователи российского и зарубежного производства мощностью 90 кВт в 2021 году обходились покупателям примерно в 200–700 тысяч рублей.
Достоинства и недостатки
Таким образом, преобразователь частоты для асинхронного двигателя, принцип работы которого описан выше, обеспечивает снижение расхода электроэнергии, плавный запуск привода и высокую точность регулировки, увеличивает пусковой момент и стабилизирует скорость вращения при переменной нагрузке. Все это в совокупности позволяет повысить коэффициент полезного действия машины. К недостаткам «частотника» можно отнести его высокую стоимость, а также создание электромагнитных помех в процессе работы.
Устройства плавного пуска
Для обеспечения плавного запуска, разгона и остановки электродвигателя используются устройства плавного пуска (УПП). Эти приборы ограничивают скорость увеличения пускового тока в течение определенного времени.
Традиционные устройства плавного пуска не решают задачу повышения КПД. Кроме того, они могут применяться только для управления приводами с небольшой нагрузкой на валу. Однако сегодня существуют разновидности УПП, позволяющие повысить энергоэффективность двигателей путем согласования крутящего момента с моментом нагрузки и, как следствие, снижения потребления электроэнергии на минимальных нагрузках на 30–40% — это контроллеры-оптимизаторы. Последние предназначены для приводов, не нуждающихся в изменении числа оборотов двигателя.
Например, чтобы снизить энергопотребление эскалатора при помощи преобразователя частоты, потребовалось бы уменьшить его скорость, но это невозможно, потому что тогда подъем пассажиров потребует более продолжительного времени. А контроллеры-оптимизаторы позволяют снизить энергопотребление без изменения скорости электропривода в тех случаях, когда он недогружен.
Контроллеры-оптимизаторы — это регуляторы напряжения питания электродвигателя, осуществляющие контроль за фазами тока и напряжения. Они обеспечивают полное управление приводом на всех этапах работы и защищают его от повышенного и пониженного напряжения, перегрузки, обрыва или нарушения чередования фаз и т.д. Контроллеры-оптимизаторы согласуют значение крутящего механического момента, развиваемого электродвигателем, со значением механического момента нагрузки на его валу за счет изменения напряжения питания двигателя. При этом скорость вращения ротора электродвигателя остается прежней, а коэффициент мощности повышается. Это оборудование является функционально законченным и не требует подключения дополнительных устройств.
При работе привода в режиме динамично меняющихся нагрузок контроллер обеспечивает прекращение отбора мощности из питающей сети в те моменты, когда полупроводниковые переходы тиристоров (управляемых диодов) закрыты, то есть не пропускают электрический ток. Тиристоры открываются при поступлении управляющих импульсов, задержка подачи которых определяется степенью загрузки привода, а закрываются при переходе тока через ноль.
Важно!Скорость реакции контроллера-оптимизатора на изменение нагрузки составляет сотые доли секунды.
Контроллеры-оптимизаторы обеспечивают повышение КПД дробилок, вентиляторов, ленточных транспортеров, обрабатывающих станков, крутильных агрегатов, лебедок и другого оборудования, используемого в промышленности, сельском хозяйстве и сфере ЖКХ. В том числе эти устройства предотвращают перегрузки кронштейнов при запуске мешалок, нейтрализуют гидроудары в трубопроводах, обеспечивают плавный запуск тяжело и очень тяжело нагруженного оборудования, на что не способны обычные устройства плавного пуска, и др.
Контроллеры-оптимизаторы обеспечивают повышение КПД оборудования, а кроме того, они, в сравнении с преобразователями, более доступны по цене. Например, устройство от отечественного производителя мощностью 90 кВт можно купить примерно за 90–140 тысяч рублей.
Контроллеры-оптимизаторы оперативно реагируют на изменение напряжения, снижают расходы электроэнергии на 30–40%, уменьшают влияние реактивной нагрузки на сеть, повышают КПД привода, позволяют сократить расходы на конденсаторные компенсирующие устройства, продлевают срок службы оборудования и повышают экологичность производства. Кроме того, они отличаются более доступной ценой, нежели преобразователи частоты. Единственным ограничением для применения контроллера является невозможность его использования в тех случаях, когда необходимо изменять скорость вращения электродвигателя.
Выбираем лучшее решение для повышения КПД
Выбор устройства для повышения КПД двигателя того или иного электропривода определяется особенностями работы оборудования. Так, если скорость привода нужно изменять, то единственно возможным решением является покупка преобразователя частоты. Если скорость вращения двигателя менять нельзя или это делать необязательно, то лучшим решением будет использование контроллеров-оптимизаторов, которые имеют более доступную стоимость, чем «частотники».
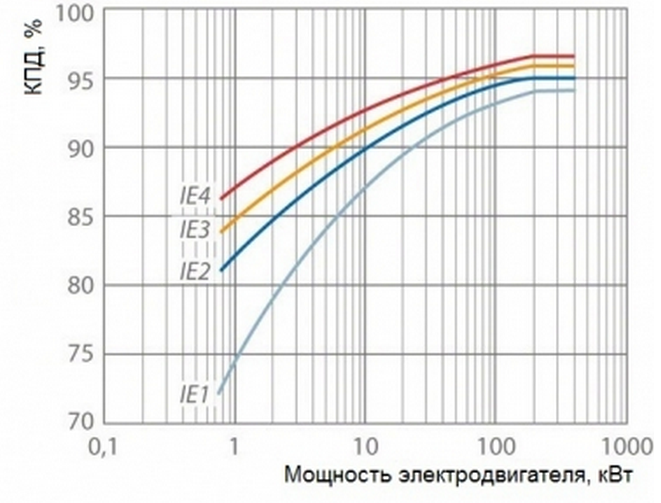
Классы энергоэффективности IEC
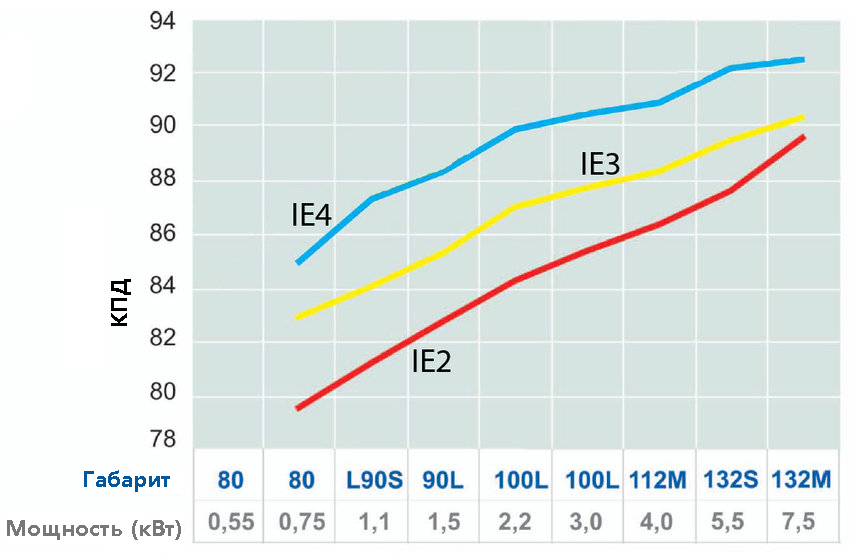
В России 01.06.2012 г. введен в действие национальный стандарт ГОСТ Р 54413-2011. Отечественные производители электродвигателей не всегда указывают значения КПД своей продукции, что, кстати, не мешает ей лидировать на рынке электромоторов в России.
Типы двигателей
В зависимости от используемого электрического тока двигатели делятся на две группы:
Электродвигатели постоянного тока сегодня применяются не так часто, как раньше. Их практически вытеснили асинхронные двигатели с короткозамкнутым ротором.

Главный недостаток электродвигателей постоянного тока — возможность эксплуатации исключительно при наличии источника постоянного тока или преобразователя переменного напряжения в постоянный ток. В современном промышленном производстве обеспечение данного условия требует дополнительных финансовых затрат.
Тем не менее, при существенных недостатках этот тип двигателей отличается высоким пусковым моментом и стабильной работой в условиях больших перегрузок. Приводы данного типа чаще всего применяются в металлургии и станкостроении, устанавливаются на электротранспорт.
Принцип работы электродвигателей переменного тока построен на электромагнитной индукции, возникающей в процессе движения проводящей среды в магнитном поле. Для создания магнитного поля используются обмотки, обтекаемые токами, либо постоянные магниты.
Электродвигатели переменного тока подразделяются на синхронные и асинхронные. У каждой подгруппы есть свои конструктивные и эксплуатационные особенности.
Синхронные электродвигатели
Синхронные двигатели — оптимальное решение для оборудования с постоянной скоростью работы: генераторов постоянного тока, компрессоров, насосов и др.
Технические характеристики синхронных электродвигателей разных моделей отличаются. Скорость вращения колеблется в диапазоне от 125 до 1000 оборотов/мин, мощность может достигать 10 тысяч кВт.
В конструкции приводов предусмотрена короткозамкнутая обмотка на роторе. Ее наличие позволяет осуществлять асинхронный пуск двигателя. К преимуществам оборудования данного типа относятся высокий КПД и небольшие габариты. Эксплуатация синхронных электродвигателей позволяет сократить потери электричества в сети до минимума.
Асинхронные электродвигатели
Асинхронные электродвигатели переменного тока получили наибольшее распространение в промышленном производстве. Особенностью данных приводов является более высокая частота вращения магнитного поля по сравнению со скоростью вращения ротора.
В современных двигателях для изготовления ротора используется алюминий. Легкий вес этого материала позволяет уменьшить массу электродвигателя, сократить себестоимость его производства.
КПД асинхронного двигателя падает почти вдвое при эксплуатации в режиме низких нагрузок — до 30-50 процентов от номинального показателя. Еще один недостаток таких электроприводов состоит в том, что параметры пускового тока почти втрое превышают рабочие показатели. Для уменьшения пускового тока асинхронного двигателя используются частотные преобразователи или устройства плавного пуска.
Асинхронные электродвигатели удовлетворяют требованиям разных промышленных применений:
Вентильные электродвигатели
Группа вентильных электродвигателей включает в себя приводы, в которых регулирование режима эксплуатации осуществляется посредством вентильных преобразователей.
К преимуществам данного оборудования относятся:
Пусковой ток электродвигателя
Зная тип и номинальную мощность электродвигателя, можно рассчитать номинальный ток.
Номинальный ток электродвигателей постоянного тока

Номинальный ток трехфазных электродвигателей переменного тока

где: PH — номинальная мощность электродвигателя; UH — номинальное напряжение электродвигателя, ηH — КПД электродвигателя; cosφH — коэффициент мощности электродвигателя.
Номинальные значения мощности, напряжения и КПД можно найти в технической документации на конкретную модель электродвигателя.
Зная значение номинального тока, можно рассчитать пусковой ток.
Формула расчета пускового тока электродвигателей

где: IH — номинальное значение тока; Кп — кратность постоянного тока к номинальному значению.
Пусковой ток необходимо рассчитывать для каждого двигателя в цепи. Зная эту величину, легче подобрать тип автоматического выключателя для защиты всей цепи.
Мощность электродвигателя
В режиме постоянной или незначительно изменяющейся нагрузки работает большое количество механизмов: вентиляторы, компрессоры, насосы, другая техника. При выборе электродвигателя необходимо ориентироваться на потребляемую оборудованием мощность.
Определить мощность можно расчетным путем, используя формулы и коэффициенты, приведенные ниже.
Мощность на валу электродвигателя определяется по следующей формуле:

где: Рм — потребляемая механизмом мощность; ηп — КПД передачи.
Номинальную мощность электродвигателя желательно выбирать больше расчетного значения.
Формула расчета мощности электродвигателя для насоса

где: K3 — коэффициента запаса, он равен 1,1-1,3; g — ускорение свободного падения; Q — производительность насоса; H — высота подъема (расчетная); Y — плотность перекачиваемой насосом жидкости; ηнас — КПД насоса; ηп — КПД передачи.
Давление насоса рассчитывается по формуле:

Формула расчета мощности электродвигателя для компрессора
Мощность поршневого компрессора легко рассчитать по следующей формуле:

где: Q — производительность компрессора; ηk — индикаторный КПД поршневого компрессора (0,6-0,8); ηп — КПД передачи (0,9-0,95); K3 — коэффициент запаса (1,05 -1,15).
Значение A можно рассчитать по формуле:

или взять из таблицы
A, 10–3 Дж/м³132164190213230245260272
Формула расчета мощности электродвигателя для вентиляторов

где: K3 — коэффициент запаса. Его значения зависят от мощности двигателя:
Q — производительность вентилятора; H — давление на выходе; ηв — КПД вентилятора; ηп — КПД передачи.
Приведенная формула используется для расчета мощности осевых и центробежных вентиляторов. КПД центробежных моделей равен 0,4-0,7, а осевых вентиляторов — 0,5-0,85.
Остальные технические характеристики, необходимые для расчета мощности двигателя, можно найти в каталогах для каждого типа механизмов.
Важно! При выборе электродвигателя запас мощности должен быть, но небольшой. При значительном запасе мощности снижается КПД привода. В электродвигателях переменного тока это приводит еще и к снижению коэффициента мощности.
Режимы работы электродвигателей
Режим работы определяет нагрузку на электродвигатель. В некоторых случаях она остается практически неизменной, в других может изменяться. Характер предполагаемой нагрузки обязательно учитывается при выборе двигателя. Действующими стандартами предусмотрены следующие режимы эксплуатации:
Режим S1 (продолжительный). При таком режиме эксплуатации нагрузка остается постоянной в течение всего времени, пока температура электродвигателя не достигнет необходимого значения. Мощность привода рассчитывается по формулам, приведенным выше.
Режим S2 (кратковременный). При эксплуатации в этом режиме температура двигателя в период его включения не достигает установившегося значения. За время отключения электродвигатель охлаждается до температуры окружающей среды. При кратковременном режиме эксплуатации необходимо проверять перегрузочную способность электропривода.
Режим S3 (периодически-кратковременный). Электродвигатель работает с периодическими отключениями. В периоды включения и отключения его температура не успевает достигнуть заданного значения или охладиться до температуры окружающей среды. При расчете мощности двигателя обязательно учитывается продолжительность пауз и потерь в переходные периоды. При выборе электродвигателя важным параметром является допустимое количество включений за единицу времени.
Режимы S4 (периодически-кратковременный, с частыми пусками) и S5 (периодически-кратковременный с электрическим торможением). В обоих случаях работа двигателя рассматривается по тем же параметрам, что и в режиме эксплуатации S3.
Режим S6 (периодически-непрерывный с кратковременной нагрузкой). Работа электродвигателя в данном режиме предусматривает эксплуатацию под нагрузкой, чередующуюся с холостым ходом.
Режим S7 (периодически-непрерывный с электрическим торможением)
Режим S8 (периодически-непрерывный с одновременным изменением нагрузки и частоты вращения)
Режим S9 (режим с непериодическим изменением нагрузки и частоты вращения)
Большинство моделей современных электроприводов, эксплуатируемых продолжительное время, адаптированы к изменяющемуся уровню нагрузки.
Рациональное потребление энергии при сохраняющейся высокой мощности сокращает текущие производственные затраты при одновременном увеличении производительности электродвигателя. Поэтому при выборе привода обязательно учитывается класс энергоэффективности.
В технической документации и каталогах обязательно указывается класс энергоэффективности двигателя. Он зависит от показателя КПД.
Проводимые в тестовом и рабочем режимах экспериментальные исследования показывают, что электродвигатель мощностью 55 кВт высокого класса энергоэффективности сокращает потребление электроэнергии на 8-10 тысяч кВт ежегодно.
В асинхронных двигателях повышение энергоэффективности достигается за счет
При выборе электродвигателя учитываются не только его технические характеристики, но и условия окружающей среды, в которых он будет эксплуатироваться.
Современные электроприводы выпускаются в разных климатических исполнениях. Категории маркируются соответствующими буквами и цифрами:
Цифры в номенклатуре модели указывают на тип ее размещения:
Зачем нужна стандартизация энергоэффективности двигателей?
Благодаря единому стандарту IEC заказчики электродвигателей во всем мире могут легко распознать оборудование с необходимыми параметрами.
В недавнем прошлом в разных странах мира действовали собственные стандарты энергоэффективности односкоростных трехфазных асинхронных электродвигателей с короткозамкнутым ротором. Например, в Европе руководствовались нормами СЕМЕР, Россия ориентировалась на ГОСТ Р 5167 2000, США — на стандарт EPAct.
В целях гармонизации требований к энергоэффективности электродвигателей Международной энергетической комиссией (МЭК) и Международной организацией по стандартизации (ISO) был принят единый стандарт IEC 60034-30. Данный стандарт классифицирует низковольтные асинхронные электродвигатели и унифицирует требования к их энергетической эффективности.






